

Home > Evaluación de Indicadores de la Condición de Aerogeneradores

Palabras clave: Aerogenerador, modelos de comportamiento normal, detección de anomalías, indicador de riesgo de modo de fallo, mantenimiento.
Key words: Wind turbines, normal behavior models, anomaly detection, failure mode risk indicator, maintenance.
Resumen: El uso de las energías renovables es indispensable para el desarrollo mundial, y la eólica es una de las más atractivas. Los aerogeneradores ocupan un papel fundamental en ese contexto y, por eso, han tenido un desarrollo tecnológico considerable. El mantenimiento aplicado a ellos, típicamente utiliza modelos de mantenimiento preventivo. Para el caso de componentes críticos, es conveniente disponer de una predicción del estado de salud con mayor precisión y suficiente frecuencia, para determinar la condición instantánea y tomar decisiones antes de que el fallo se desarrolle. Este artículo describe un método para estimar indicadores de la condición, calculados en base a la evolución de la vida del sistema (comportamiento normal y sobrecargas de trabajo). La idea es que, el modelado de estos indicadores asociados a los modos de fallo de los componentes ayude a replanificar el mantenimiento, de forma dinámica y según la real evolución de su vida.
Abstract: The use of renewable energy is essential for global development and wind power is one of the most attractive among them. Wind turbines occupy a central role in this context and they have had a significant technological development in the last years. Usually the maintenance applied to them is based on preventive models. In the case of critical components is desirable to have a more accurately and frequently enough health forecasting to determine its condition and make decisions instantly before the fault develops. This paper describes a method for estimating health condition indicators based on the evolution of the system life (normal and overload behavior). The idea is that the modeling of these indicators associated with the wind turbine components failure modes help to reschedule dynamically the maintenance plan according to its real-life developments.
Autor: Rodrigo José de Andrade Vieira , Miguel Ángel Sanz Bobi

Rodrigo José de Andrade Vieira Ingeniero Mecánico (2001), Máster en Vibraciones y Acústica/Desarrollo de Productos (2008) por la Universidad Federal del Pará (Brasil), y Diploma de Estudios Avanzados (2010), por la Universidad Pontificia Comillas (España). Actualmente es Investigador en Formación del Instituto de Investigación Tecnológica (IIT), donde es miembro del área de Sistemas Inteligentes, participando en proyectos aplicados al diagnóstico y al mantenimiento de procesos industriales.

Miguel Ángel Sanz Bobi Profesor de la Escuela Técnica Superior de Ingeniería (ICAI), de la Universidad Pontificia de Comillas. Desarrolla sus actividades dentro del Departamento de Sistemas Informáticos y del Instituto de Investigación Tecnológica. Sus áreas de conocimiento giran alrededor del campo de la fiabilidad y el mantenimiento de sistemas industriales, así como de aplicación de técnicas de Inteligencia Artificial para la supervisión, y diagnóstico de procesos industriales complejos.
La condición de los aerogeneradores y el mantenimiento
Cada día, el uso de las energías renovables se vuelve más indispensable para el desarrollo mundial, tanto por ser fuentes ilimitadas de energía, como por ser en buena parte "limpias", es decir, con un impacto muy pequeño en el medio ambiente, al contrario de lo que ocurre con las fuentes de energía tradicionalmente usadas desde hace décadas (petróleo, nuclear, etc.). El viento es una de las más atractivas fuentes de energía renovable, y la energía eólica es uno de los negocios que más ha crecido en los últimos años (su tasa mundial de crecimiento anual nunca ha sido inferior al 20% desde 1998). Las previsiones para esta década que ya ha comenzado, es que se multiplique por seis la potencia instalada mundial que hay actualmente. Esta expansión esperada está fundamentada por el continuo crecimiento del número de parques eólicos en todo el mundo, así como por las expectativas de futuras nuevas instalaciones eólicas (onshore y offshore) en los próximos años [1]. De este modo, los aerogeneradores ocupan un papel fundamental en ese contexto, y por eso han tenido un despliegue y desarrollo tecnológico considerable en los últimos años.
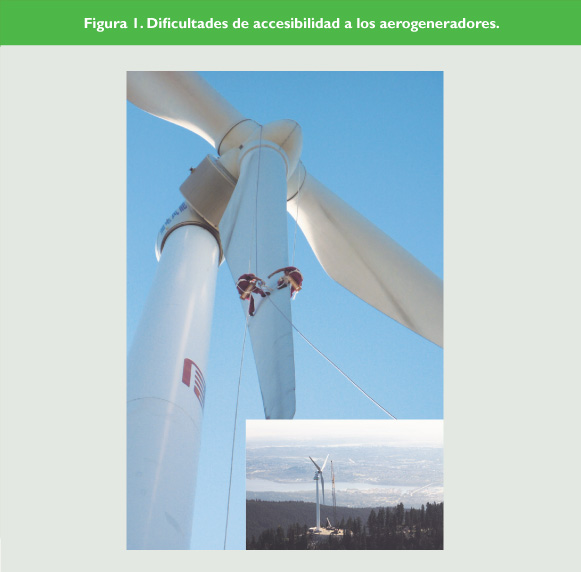
Figura 1. Dificultades de accesibilidad a los aerogeneradores.
Todo este crecimiento ha llevado consigo un lastre común: los costes de operación y mantenimiento (O&M). Los parques eólicos se encuentran situados en zonas de difícil accesibilidad (Figura 1), alejadas de las poblaciones, aún más si se trata de parques offshore; además los aerogeneradores soportan a lo largo del año condiciones climáticas extremas y muy variadas. Por todo ello, y teniendo en cuenta que para realizar la gran mayoría de las acciones de mantenimiento es necesario subir hasta la góndola del aerogenerador, los costes en O&M suponen gran parte de la inversión total, efectuada en el parque eólico durante una explotación de 20 años.
El uso eficiente, con el menor coste posible de los activos disponibles en una empresa, es un factor crucial en el contexto actual. Mantener el valor del activo tan alto como sea posible es un objetivo, y motivo de preocupación extendido en el sector industrial. En esta dirección, la aplicación del mantenimiento adecuado en el momento apropiado contribuye, sin ninguna duda, a alcanzar dicho objetivo. En ocasiones, un equipo, sistema o proceso industrial, se ve afectado durante su vida por condiciones internas y externas que pueden inducir modos de fallo o, al menos, contribuir a la presencia de ciertos síntomas, que pueden favorecer el desarrollo posterior de un modo de fallo.
Con objeto de garantizar su disponibilidad y fiabilidad, cada vez hay más técnicas que permiten realizar un seguimiento de la vida de los aerogeneradores. Estas técnicas, usan la información de monitorización continua disponible de la vida de operación, para intentar, tanto detectar y diagnosticar posibles anomalías que puedan acabar en fallos inesperados, como poder así evaluar mejor la condición de los aerogeneradores a corto-medio plazo. El conseguir una mayor disponibilidad de estos equipos, es de esperar que vaya acompañada de una reducción de los costes de explotación y mantenimiento de los parques eólicos.
En la actualidad, el mantenimiento que se viene aplicando en los aerogeneradores en operación, típicamente utiliza modelos de mantenimiento preventivo basados en intervenciones a intervalos de tiempo constante, o por número de horas de funcionamiento. Estas estrategias de mantenimiento son las recomendadas por los fabricantes de los aerogeneradores. Sin embargo, éstas no tienen presente la vida real y local de los aerogeneradores, como, por ejemplo, las condiciones meteorológicas locales, posible estrés por sobrecargas, horas trabajadas de forma continua, arranques, etc. Todos estos factores son determinantes para conocer el detalle de la vida real de cada aerogenerador, y el mantenimiento que realmente necesita. La aplicación del mantenimiento realmente necesario permitirá llevar a cabo una política de inversión óptima en recursos de mantenimiento, y además ayudará a prolongar tanto como sea posible el ciclo de vida del aerogenerador.
El análisis de fallos de componentes de aerogeneradores y sus causas es un área de especial atención en la investigación actual, que tiene por objetivo la mejora de su fiabilidad y mantenibilidad [2]. Los más recientes avances en tecnología de medida permiten el uso de sensores, capaces de monitorizar características relevantes de la condición de salud de componentes industriales. Los aerogeneradores son máquinas que trabajan de forma remota desasistida y que, traen de fábrica un importante número de sensores que, típicamente, son esenciales en el control automático de las diferentes partes del aerogenerador. Estos sensores no sólo son útiles desde el punto de vista de operación, sino que también pueden tener un importante valor en el mantenimiento de la máquina. De hecho, los sensores instalados, más otros que se pueden añadir, podrían usarse para aplicar técnicas de seguimiento de la condición del estado de salud de los aerogeneradores [3]. Asimismo, técnicas de minería de datos y de Inteligencia Artificial también están siendo usadas de manera intensiva para contribuir al mismo propósito [4]. Los resultados de estas técnicas son la base de otros nuevos modelos de mantenimiento predictivo y/o basadas en la condición [5].
Además, cabe destacar que, para el caso de componentes críticos, sería conveniente disponer de una predicción del estado de salud con mayor precisión, y con suficiente frecuencia como para poder determinar la condición instantánea y tomar decisiones antes de que el fallo se desarrolle demasiado [6]. Por lo tanto, para aquellos equipos que se consideren críticos, y donde no resulte aceptable asumir los riesgos derivados del cálculo de probabilidad, es necesario disponer de los siguientes medios: un sistema de captura de datos en continuo (ya instalados en los aerogeneradores), modelos de comportamiento normal, detección de anomalías , y evaluación del estado de salud, para así sugerir cambios en el plan de mantenimiento con vistas a la vida real del componente [7], [8].
Por otro lado, así como es muy común hoy día que en los procesos industriales existan sistemas de seguimiento continuo para asistir al operador del sistema de producción, también es común que este tipo de información no esté típicamente unido al plan de mantenimiento. Sin embargo, están emergiendo cada vez más propuestas para integrar la información usada en operación con el plan de mantenimiento. En esta dirección, hay diferentes contribuciones en el campo de la energía eólica [9].
Este artículo describe un nuevo método de estimar indicadores de riesgo observable o de la condición, calculados en base a la evolución de la vida de un sistema, prestando especial atención a momentos de ciertas solicitaciones extremas, o sobrecargas de trabajo que ha ido sufriendo. La idea es que el modelado de estos indicadores asociados a los modo de fallo de componentes de aerogeneradores, ayude a confirmar o replanificar el mantenimiento preventivo en el equipo, de una forma dinámica, de acuerdo la real evolución de su vida.
Indicadores de la condición
Figura 2. Metodología para evaluación del indicador de riesgo
Uno de los conceptos clave en este artículo es el de indicador de condición basado en la vida observada. Éste, se define como la desviación entre el comportamiento real observado de un componente y el esperado como normal, según la condición de trabajo presente. Estas desviaciones entre comportamiento real y esperado para una condición de trabajo, pueden ser más o menos severas en la vida de un componente, y pueden ser interpretadas como posibles síntomas que llevan a anomalías y modos de fallo o no, pero, en cualquier caso, sí contribuyen a poner el entorno o germen adecuado para un posible desarrollo de modos de fallo. El comportamiento normal esperado se basa en la elaboración de modelos, que caracterizan la evolución típica en tiempo real de unas variables, en función de la evolución de otras observadas en ausencia de anomalías. Las desviaciones observadas respecto al comportamiento normal previsto en una variable, pueden ser usadas para caracterizar de forma cualitativa ciertos indicadores de la condición por modo de fallo. Su agregación a lo largo del tiempo permite observar su evolución y, de ahí, deducir si se está próximo o no a rebasar ciertos umbrales, considerados límites a partir de los que es más probable la aparición de un fallo. La cercanía a esos umbrales servirá de guía para replanificar el mantenimiento programado, de tal forma que, éste se aplique, cuando realmente se necesite.
La Figura 2 muestra el esquema general de la metodología desarrollada. En él, se relacionan las informaciones históricas de incidencias y eventos (de fallos y mantenimiento), el seguimiento continuo, el pronóstico y el plan de mantenimiento, promoviendo una necesaria y esperada integración de distintas fases del ciclo de vida de estos equipos.
En posteriores apartados se presentará el uso de este método propuesto y su aplicación al caso real de un aerogenerador.
Pre-procesado de la información conocida
La información conocida y necesaria para la aplicación del método propuesto se ha de clasificar en dos grandes grupos: la historia lejana y la historia reciente. La historia lejana se corresponde con eventos de fallo ocurridos, y acciones de mantenimiento realizadas. En general, a partir del análisis de esos datos, se pueden proponer modelos matemáticos, basados normalmente en tasas de fallo y de reparación, además de determinar los modos de fallo críticos del sistema. La historia reciente la compone información obtenida de observaciones de la vida de componentes, tales como inspecciones, datos de seguimiento continuo o cualquier otra fuente de información. Esta información es la que va a permitir evaluar el comportamiento del componente, según las condiciones de operación a las que está sometido, detectar anomalías, y así estimar su estado de salud.
Las historias de fallos y eventos que impactan en la disponibilidad de un sistema (historia lejana), contemplan aspectos del sistema bajo estudio, que han sucedido hace un tiempo (de medio y largo plazo), y no tienen la perspectiva del día a día de los componentes de ese sistema. Así, sólo se conocen unos pocos instantes significativos y muy concretos de la vida de un sistema o componente, en particular, aquéllos que se refieren a cuando aconteció una indisponibilidad, o se aplicó una acción de mantenimiento. De su análisis sólo se pueden realizar previsiones acerca de esos tipos de sucesos, con la incertidumbre que toda extrapolación sobre algo cambiante y, a veces, desconocido conlleva. De aquí, surge la idea de los sistemas de seguimiento en continuo de determinadas variables de los componentes (basándose en la elaboración de un Failure Mode, Effects and Criticality Analysis - FMECA), que dan una referencia, acerca de determinadas características, que pueden alertar de la posible presencia de un modo de fallo antes de que se produzca.
El "Análisis de los Modos, Efectos y Criticidad de los Fallos" (FMECA) es un método sistemático, que permite identificar los "puntos" críticos del sistema, y así ayudar a evitar fallos (y sus posibles consecuencias), que puedan afectar o impactar a las funciones principales del mismo, bajo un contexto operacional dado. El FMECA tiene como objetivo identificar y clasificar todas las formas o modos en los cuales puede fallar un activo dentro de un proceso, según su ocurrencia, severidad y detectabilidad, además de identificar las posibles consecuencias o efectos de los fallos, en función de tres criterios básicos: seguridad humana, ambiente y operaciones (producción).
Sin embargo, es bien conocido que, en diagnóstico industrial, hay modos de fallo observables, y otros no observables. Los observables pueden ser detectados a través de seguimiento de los valores de una o varias variables medidas que lo caracterizan, y permiten establecer ciertas hipótesis sobre cómo de cerca estaría la presencia del modo de fallo. Sin embargo, los modos de fallo no observables son difíciles de predecir a través de seguimiento continuo, al no existir variables que lo delaten. Casos intermedios son aquellos en que los modos de fallo no son observables, pero es posible saber algo de ellos de forma indirecta, a través de algunas variables.
En el caso que se describirá, un aerogenerador ha sido dividido en tres sistemas que tratan de agrupar las partes más conflictivas desde el punto de vista de sus fallos. Estos son: Generador, Multiplicadora, y Otros (Sistema Control Pitch, Conjunto Rotor/Palas/Eje, etc.). Los modos de fallo considerados han sido: Fallo/Avería Generador, Temperatura Disparo del Cojinete L.A. del Generador, Alta Temperatura del Generador, Error de Sincronismo, Fallo de Frecuencia, Error de Accionamiento del Pitch, Fallo de Refrigeración de la Multiplicadora, Alta Temperatura del Aceite de la Multiplicadora, Alta Temperatura de la Multiplicadora y Fallo Velocidad Rotor # Velocidad Generador.
La historia reciente, o recogida en continuo de información de operación, es la pieza fundamental en el seguimiento del "estado de salud" de un componente, y en la que se centra este trabajo. Los aerogeneradores tienen la ventaja de tener incorporados un gran número de variables monitorizadas. Su uso fundamental es el control de las diferentes partes del aerogenerador, pero aquí se le ha dado un uso adicional para valorar su condición.
Identificados los modos de fallos considerados más importantes en un aerogenerador, bajo este estudio y con vistas al desarrollo de los modelos de comportamiento normal, se han determinado las variables que podían aportar información sobre la presencia de posibles modos de fallo. Estas han sido: Temperatura Ambiente, Temperatura de la Góndola, Potencia Total, Velocidad del Viento, Velocidad del Rotor, Ángulo de Pitch, Temperatura del Aceite de la Multiplicadora, Temperatura de la Multiplicadora, Temperatura del Cojinete L.A. del Generador y Temperatura de la Bobina del Generador.
Modelos de Comportamiento Normal
Cuando un componente desarrolla la función para la cual ha sido diseñado en condiciones normales, el efecto del envejecimiento suele ser la causa más frecuente de los fallos. Sin embargo, además de este efecto, en algunas situaciones el componente es "estresado", debido a las duras condiciones de trabajo, sobrecarga, a las condiciones ambientales extremas, o a una combinación de ambas. Es muy importante caracterizar el comportamiento normal esperado para un componente cuando opera en distintas condiciones de trabajo, porque cualquier desviación de este comportamiento, puede alertar sobre la presencia de un posible modo de fallo que podría desarrollarse. Cuanto antes se detecte la desviación, antes se puede intentar mitigar el efecto de un fallo y, para eso, es necesario utilizar información recogida en tiempo real sobre la evolución de las principales variables, que pueden caracterizar el funcionamiento de un componente. Bajo este contexto, se ha procedido a desarrollar modelos de comportamiento normal, capaces de predecir el comportamiento dinámico on-line de las variables importantes del sistema, de cara a detectar posibles anomalías. El comportamiento normal o de referencia, incluye muchas situaciones de diferentes condiciones, de operación normal en sus condiciones habituales de funcionamiento, y ambientales; sin síntomas de fallo y, por tanto, sin "estrés".
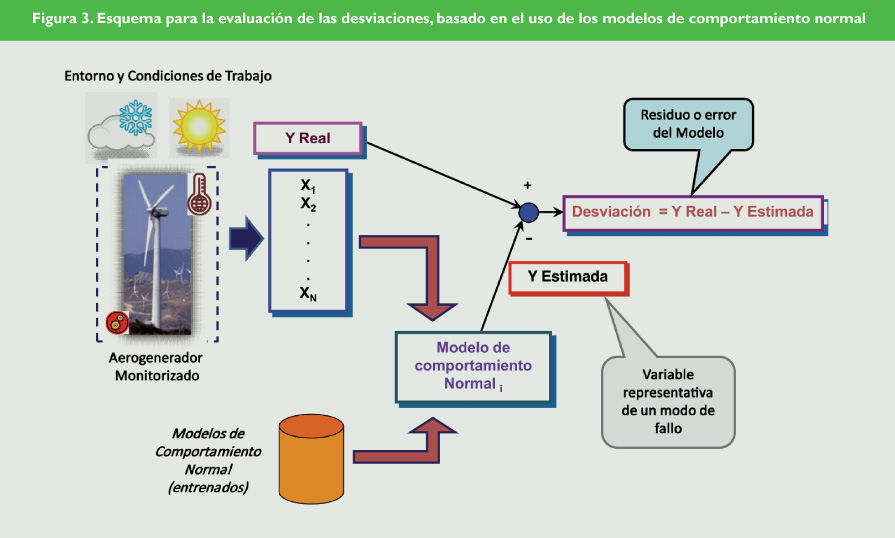
Figura 3. Esquema para la evaluación de las desviaciones, basado en el uso de los modelos de comportamiento normal
Cualquier fallo incipiente provocará una desviación, entre la estimación del modelo (basada en el comportamiento normal), y el valor real de la variable observada, lo que puede dar lugar a detectar cuanto antes un modo de fallo y, si fuese posible, adaptar los tiempos de lanzamiento de órdenes de trabajo de mantenimiento, que lo tratan de evitar o mitigar. La Figura 3 ilustra el esquema para la evaluación automática de las desviaciones de comportamiento, basado en el uso de modelos de comportamiento normal, y donde su estimación es una variable clave para la detección de los modos de fallo.
El seguimiento continuo de la desviación observada, respecto al comportamiento normal esperado de la evolución de una variable, puede ser usado como un indicador de la condición de salud de un componente.
El desarrollo de modelos de comportamiento normal se realiza siguiendo los siguientes pasos más significativos:
- Análisis de la información o series temporales recogidas para observar posibles relaciones entre las variables medidas.
- Definición de las características más representativas de los modos de fallo, que pueden ser detectados utilizando la información disponible en tiempo real.
- Formulación de los modelos a partir del entrenamiento de varias configuraciones de perceptrones multicapa.
- Validación de los modelos.
Hay que tener presentes dos conceptos importantes a la hora de crear los modelos. Por un lado, estos modelos deben usar en el entrenamiento, los datos que más se aproximen a un comportamiento normal del equipo en las condiciones habituales. Por otro lado, la calidad del modelo dependerá de la capacidad de conseguir relacionar las variables de entrada, con las de salida, con el menor error, hecho que va a diferenciar/variar la fiabilidad entre distintos modelos.
Después que un modelo de comportamiento normal ha sido entrenado y validado, se puede utilizar con nuevos valores de entrada reales, correspondiendo su predicción, con el comportamiento normal esperado, bajo las condiciones de trabajo actuales para, así, compararlo con el funcionamiento real que se está registrando. En caso de que el valor real y estimado para una variable no coincidiera, se evaluaría esta desviación, registrando no sólo el instante en el que se ha producido, sino también su valor, para así generar, tanto la correspondiente alarma sobre la posible presencia de un modo de fallo, como la actualización del valor de indicador de riesgo de fallo (Ver Figura 2).
Los modelos desarrollados y presentados como ejemplo están basados en la información recogida en tiempo real de un parque eólico. Tras analizar conjuntamente los posibles modos de fallo y las señales disponibles, se decidió crear 13 modelos de comportamiento normal.
Como ejemplo del procedimiento seguido para el desarrollo de los modelos de comportamiento normal, se presentará el caso del modelo de comportamiento normal, para la predicción de la temperatura de la multiplicadora de un aerogenerador. Este modelo está habilitado para predecir la temperatura de la multiplicadora de un aerogenerador, utilizando la información de tres variables de entrada: la potencia total generada, la temperatura de la góndola y la temperatura del aceite, correspondiente al sistema de refrigeración. La primera variable de entrada es utilizada para conocer la condición de carga de la multiplicadora, la segunda da una idea sobre las condiciones del entorno de trabajo de la multiplicadora, y la tercera incluye el efecto del sistema de refrigeración.
Para desarrollar los modelos de comportamiento normal, es necesario seleccionar entre todos los datos disponibles, los periodos de tiempo donde el funcionamiento del componente ha sido considerado normal. Además, los datos seleccionados deben cubrir un amplio y típico rango de las condiciones de trabajo. En el caso del desarrollo del modelo de comportamiento normal para la temperatura de la multiplicadora, ocho meses, en un periodo de un año, han sido seleccionados para cubrir diferentes condiciones de trabajo de los aerogeneradores, a lo largo de las cuatro estaciones climáticas, es decir, dos meses para cada estación.
Para crear los modelos de comportamiento normal de manera que puedan caracterizar la condición de un aerogenerador, ha sido desarrollada una aplicación en MATLAB, capaz de entrenar diferentes arquitecturas de perceptrones multicapa, al mismo tiempo que modelan las relaciones existentes entre la evolución de un conjunto de variables de entrada al modelo, y otra variable de salida, también medida [10]. Las relaciones modeladas son características del comportamiento normal de un componente industrial, en sus condiciones de trabajo habituales, a través de la aproximación de relaciones no lineares entre variables.
Las redes neuronales entrenadas están constituidas de una única capa oculta, con un número variable de neuronas con función de activación sigmoidal. La capa de salida utiliza una función de activación lineal. El algoritmo de entrenamiento utilizado es el de "retro-propagación de Levenberg-Marquardt".
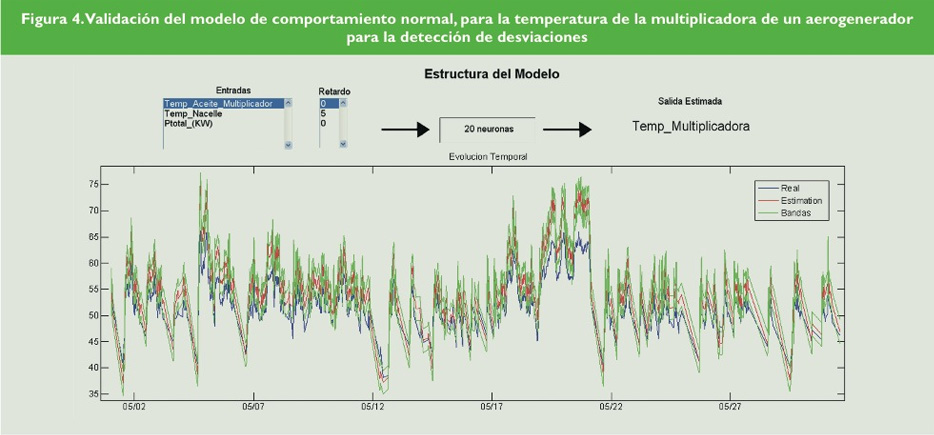
Figura 4.Validación del modelo de comportamiento normal, para la temperatura de la multiplicadora de un aerogenerador para la detección de desviaciones
Después de finalizada la etapa de entrenamiento del modelo de comportamiento normal, se intentan detectar posibles anomalías con respecto al comportamiento esperado pasando, a través del modelo, nuevos datos de funcionamiento. La Figura 4 muestra la estimación del modelo de comportamiento normal para la temperatura de la multiplicadora, cuando utiliza nuevos datos recogidos en el mismo año, pero que no han sido utilizados para el entrenamiento del modelo ya que, en particular, se ha utilizado la información de un mes. Como se puede observar, la estimación del modelo y el valor real de la variable están muy próximos, y no se observa comportamiento anormal en ese periodo de tiempo, lo que valida este modelo como representante del comportamiento normal de la temperatura de la multiplicadora en tiempo real.
En la parte superior de la Figura 4 se presenta la estructura del modelo de comportamiento normal. Como se puede ver en este ejemplo, el modelo de comportamiento normal tiene las entradas mencionadas anteriormente y, como salida, la temperatura de la multiplicadora del aerogenerador. La temperatura de la góndola en este modelo está retrasada de 5 unidades de tiempo, que se obtuvieron en análisis preliminares de máxima correlación, entre valores de entrada y salida del modelo.
A lo largo del proceso de ajuste o entrenamiento del modelo de comportamiento normal, el error de estimación ha sido utilizado para definir las bandas de confianza, que serán utilizadas para decidir cómo de diferentes pueden ser los valores reales y estimados, para considerarlos normales.
De igual forma, se desarrollaron otros 12 modelos de comportamiento normal, para vigilar la posible aparición de otros modos de fallo. Todos estos, permiten la evaluación en tiempo real de la condición de los aerogeneradores del parque eólico, e indican si existe alguna condición de riesgo, por el posible desarrollo de un modo de fallo.
Evaluación de las Desviaciones del Comportamiento Normal
Una vez elaborados los modelos de comportamiento normal a utilizar, se pueden emplear en tiempo real, para detectar la presencia de posibles desviaciones del comportamiento normal esperado. Los modelos permitirán estimar el valor que deberían tener sus variables de salida, en función de las entradas que reciben o contexto de trabajo. Habrá comportamiento normal si la salida estimada por el modelo está bastante cerca del valor real medido. Por el contrario, si los valores no están cerca, una posible anomalía está presente y debe ser vigilada e investigada. Se detecta una desviación, cuando la variable de salida real se encuentra fuera del rango de su estimación prevista. La desviación se calcula como una relación de distancias entre el valor de la variable real y el valor estimado, con su banda de confianza de comportamiento normal. Las bandas de confianza, se han definido para cada modelo, como más o menos dos veces la desviación típica del error de ajuste de dicho modelo en su etapa de entrenamiento.
Se ha desarrollado una aplicación en MATLAB, para evaluar posibles desviaciones de comportamiento normal. La aplicación hace un análisis comparativo de los datos de tiempo real recogidos, en el aerogenerador monitorizado, y de los valores estimados por los modelos de comportamiento normal existentes. Dicha comparación tiene como fin identificar posibles desviaciones en el comportamiento de los componentes bajo estudio. Este análisis se puede realizar tanto de forma conjunta, teniendo en consideración la evaluación de todos los modelos que estiman una misma variable, o de forma independiente, es decir, observando cada modelo de forma aislada. Finalmente, se dispone de una lista con todas las desviaciones ocurridas, y sus respectivos desvíos detectados durante el proceso de evaluación, para así poder comenzar el diagnóstico incipiente de fallos, y la evaluación del estado de salud del componente.
En la Figura 5 se puede observar un ejemplo de cómo la temperatura de la multiplicadora alcanza valores demasiado elevados con respecto a los estimados por el modelo (Puntos "A" y "B"). Dichos puntos son detectados como anomalías. En especial, para el caso del punto "C", la desviación será considerada cero, pues la temperatura real es inferior a la temperatura estimada, significando que la situación real no provocará una sobrecarga en el componente.
Cuando un componente es "estresado", debido a duras condiciones de trabajo y sobrecarga, se facilitan las condiciones del desarrollo de posibles modos de fallo, si ninguna acción es tomada para evitarlo o mitigarlo. Asimismo, también se facilita una aceleración del envejecimiento natural del mismo.
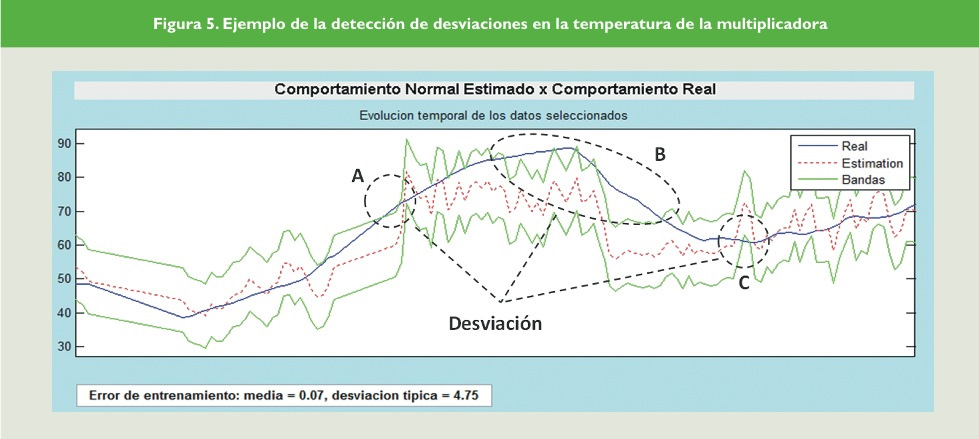
Figura 5. Ejemplo de la detección de desviaciones en la temperatura de la multiplicadora
Figura 6. Principales indicadores de un modo de fallo
La Figura 6 muestra a través del símil entre la estructura de un modo de fallo y la estructura de un iceberg, cómo se puede caracterizar el modo de fallo, en función de síntomas, o indicadores observados. Uno de los síntomas, usualmente vigilado por muchos métodos de seguimiento continuo, es la aparición de anomalías, cuando la desviación calculada sobrepasa un determinado "umbral", es decir, el modo de fallo ya se encuentra presente en el componente, provocando una desviación cada vez mayor en el comportamiento esperado del mismo. Así que, si el valor real de la variable de salida del modelo está dentro de sus bandas de confianza, no existe ninguna anomalía presente y el modelo es etiquetado con un color "verde" en la aplicación desarrollada. Si el valor real medido está fuera de la banda de confianza establecida, el modelo es etiquetado en "amarillo", pues todavía no existe suficiente evidencia de la presencia permanente de un síntoma de anomalía. Sin embargo, cuando continuamente son etiquetadas con amarillo una serie de desviaciones en muy corto intervalo de tiempo, la etiqueta cambia a "rojo", y la presencia de un comportamiento anormal es confirmada.
Otro síntoma, es la evaluación del nivel de degradación del componente, frente a un determinado modo de fallo, es decir, el modo de fallo todavía no ha provocado una gran desviación del comportamiento del componente, pero se sabe que dicho componente ha sido "estresado" y, en consecuencia, existe un mayor riesgo de desarrollo del modo de fallo. En general, cuando se detecta la presencia de una anomalía, ya subyace el desarrollo de un proceso de degradación que ha provocado la misma. La evaluación de la degradación, frente a los modos de fallo de los componentes del aerogenerador, se realiza a través de la determinación del indicador de riesgo.
Indicador de Riesgo de Indisponibilidades
Los párrafos siguientes describen un nuevo enfoque propuesto por los autores para conocer mejor la condición de salud de un aerogenerador y sugerir, en caso necesario, cómo replanificar el mantenimiento preventivo que hay programado [11].
Las desviaciones, con respecto a la evolución esperada de una variable que puede suministrar información importante sobre la posible presencia de un modo de fallo, pueden usarse como indicadores de riesgo de la salud del componente, relativos a uno o varios modos de fallo.
Por ejemplo, un modo de fallo de naturaleza térmica en la multiplicadora de un aerogenerador, causaría un incremento en la temperatura medida en dicha multiplicadora, por encima del valor de la temperatura normal esperada bajo las actuales condiciones de trabajo. La desviación observada puede causar o no un fallo pero, en cualquier caso, su valor ha de tenerse presente bajo un indicador de riesgo, que indicaría que se han vivido ciertas condiciones, que facilitan la aparición de un modo de fallo térmico en la multiplicadora.
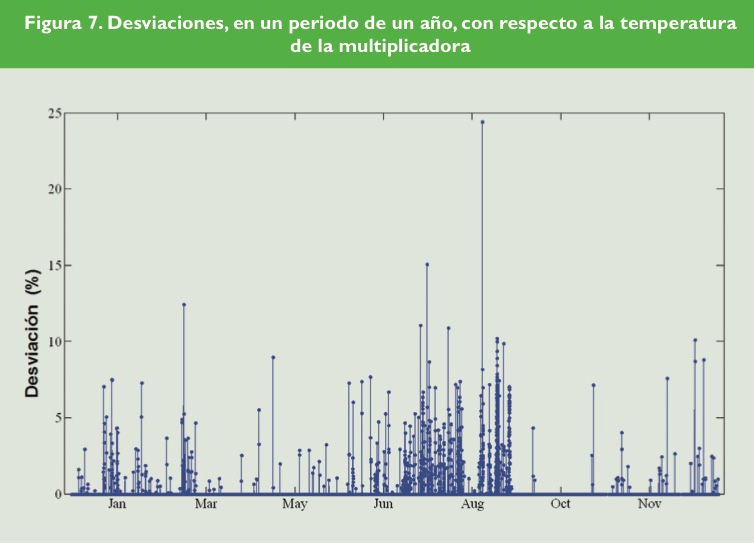
Figura 7. Desviaciones, en un periodo de un año, con respecto a la temperatura de la multiplicadora
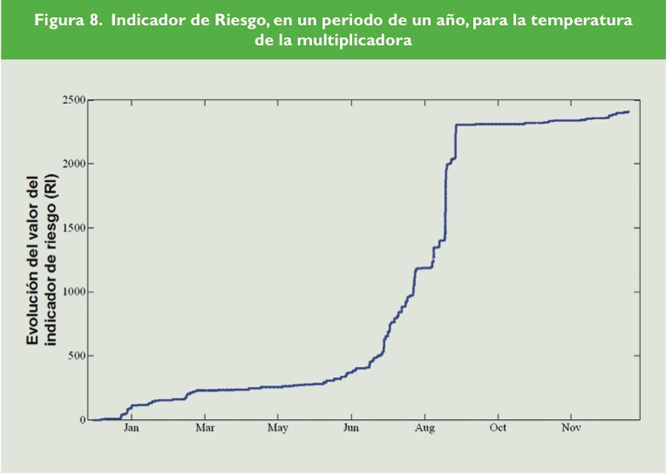
Figura 8. Indicador de Riesgo, en un periodo de un año, para la temperatura de la multiplicadora
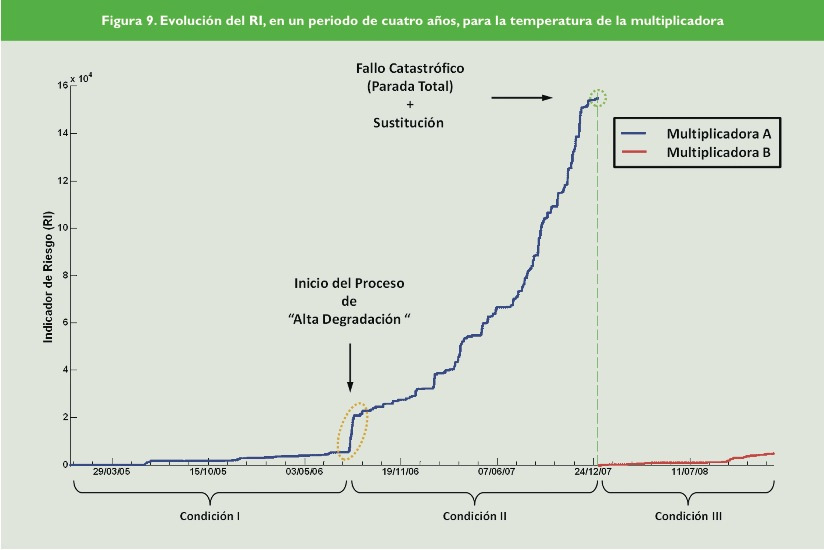
Figura 9. Evolución del RI, en un periodo de cuatro años, para la temperatura de la multiplicadora
Así, se calcula el valor del "Indicador de Riesgo – RI" como la suma de desviaciones entre el comportamiento normal esperado, y el valor real observado para la variable monitorizada, registradas durante un periodo determinado. A modo de ejemplo, las Figura 7 y 8 muestran las desviaciones, y el RI estimado, en un periodo de tiempo de un año, usando el modelo de comportamiento normal de la temperatura de la multiplicadora, que permite detectar valores anormales de temperatura en dicho componente del aerogenerador.
Ambas figuras presentan la misma información pero la Figura 8 ilustra más claramente la evolución de sobre-temperatura en el tiempo, para la multiplicadora del aerogenerador. Aquellos instantes de tiempo en que cambian las pendientes de la gráfica de la Figura 8, son de especial interés, y tanto más cuanto la pendiente es mayor, ya que serían momentos en que el estrés térmico manifestado a través del valor de RI, es mayor en la multiplicadora. Esta información configura, al menos de forma parcial, una idea sobre la condición de salud de la multiplicadora del aerogenerador, en este caso ejemplo. Lo anterior, para un modo de fallo, puede ser extendido al caso en que un modo de fallo es monitorizado a través de varios modelos de comportamiento normal. Además, el RI evaluado para los modos de fallo, compondrá el indicador de riesgo de los componentes, para que, finalmente, se pueda estimar el riesgo de fallo del aerogenerador.
En la Figura 9 se presenta la evolución del RI en un periodo de cuatro años (de 01/01/2005 hasta 31/12/2008), para el modo de fallo de alta temperatura, de la multiplicadora de un aerogenerador (Multiplicadora A). Al principio del periodo ("condición I"), la multiplicadora no presentaba grandes desviaciones en su comportamiento normal, previsto lo que se puede observar a través de los pequeños valores de RI registrados a lo largo del mismo. Sin embargo, aproximadamente en agosto de 2006, algo pasa en la multiplicadora, causando grandes desviaciones de comportamiento, y un salto en el valor de RI. Se ha producido una situación de estrés. A partir de ese momento se inicia un proceso de degradación acelerada ("condición II"), que está reflejado en el crecimiento gradual del RI, y de la pendiente de su curva. Por fin, al principio de 2008, la multiplicadora ha sufrido un "fallo general", que ha provocado su puesta fuera de servicio y sustitución por una nueva (Multiplicadora B). Una vez puesta en operación la nueva multiplicadora y, en consecuencia, reiniciada la evaluación del RI desde cero ("condición III"), se observa que el valor de RI no vuelve a crecer como en la "condición II", sino como en la "condición I", indicando que el proceso de degradación ha desaparecido como cabía esperar, y que la multiplicadora ha vuelto a operar en condiciones normales de funcionamiento.
Instantes antes del "fallo catastrófico" (a partir de agosto de 2007, es decir un año después del inicio del proceso de "alta degradación"), muchas alarmas han sido detectadas indicando altas temperaturas, pero la multiplicadora ya estaba en un estado de salud donde no existía opción para evitar que el fallo se produjera.
Conclusiones
La detección de una anomalía y evaluación del RI permite evaluar el estado de salud del componente de forma cualitativa, y servir de referencia para la replanificación del mantenimiento, si fuese necesario. De este modo, se aplicará la acción de mantenimiento más oportuna, y cuando de verdad es requerida, de acuerdo a la vida observada de un componente, minimizando costes de recursos, que podrían no ser necesarios, y manteniendo al componente en las mejores condiciones de salud.
En los ejemplos discutidos, se ha podido observar la capacidad de la metodología presentada en anticipar la detección del modo de fallo, a través de la estimación de la condición de salud, tanto con la detección de anomalías ("alarmas"), como con la evaluación del indicador de riesgo, RI.
Éste tiene un papel muy importante en la metodología propuesta, ayudando en el proceso de toma de decisión sobre cuándo realizar una acción de mantenimiento con suficiente tiempo de antelación, de modo que se pueda minimizar los efectos y consecuencias, de los modos de fallo en la vida del aerogenerador.
Descargar este artículo en formato PDF ![]()